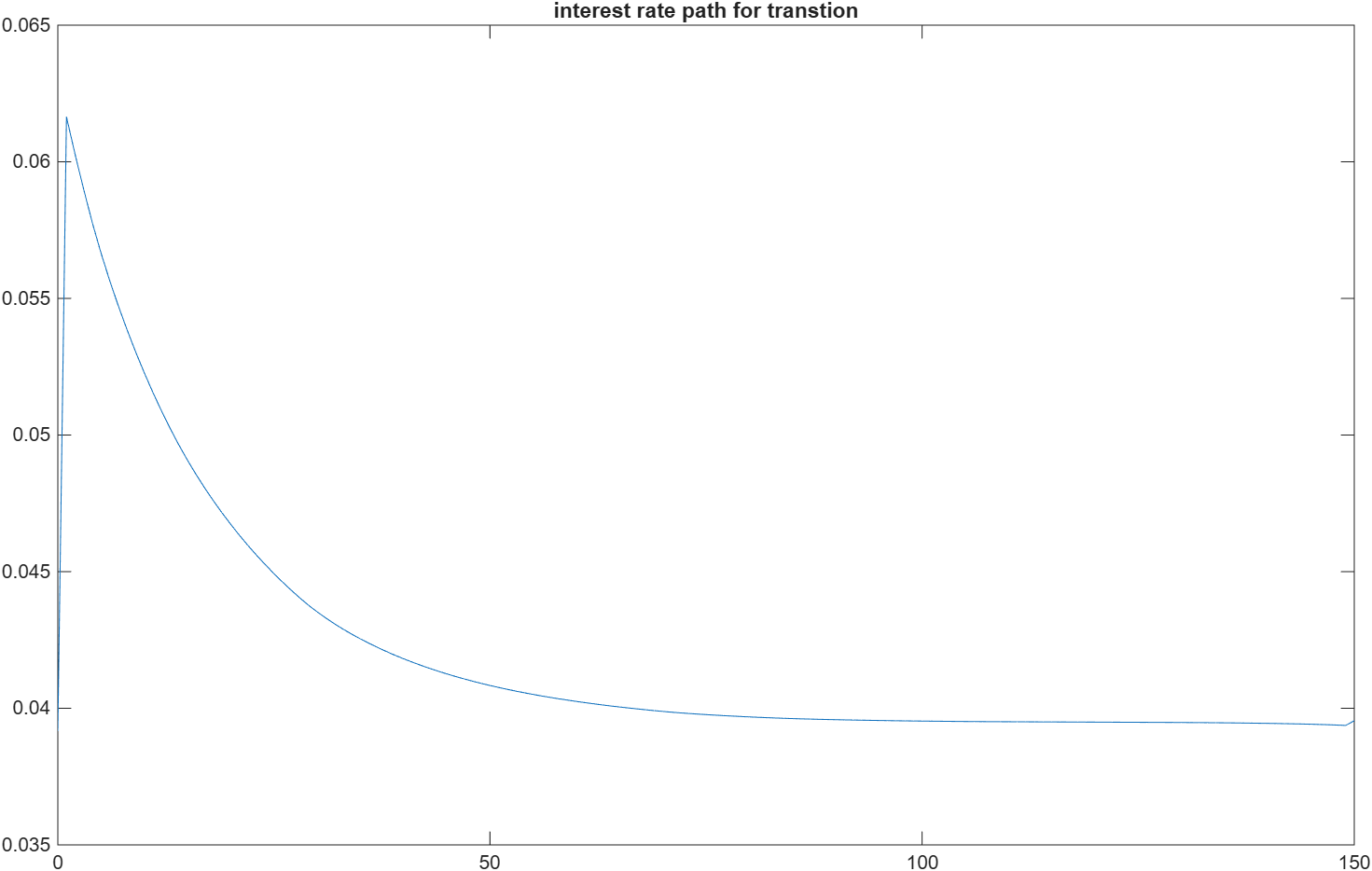
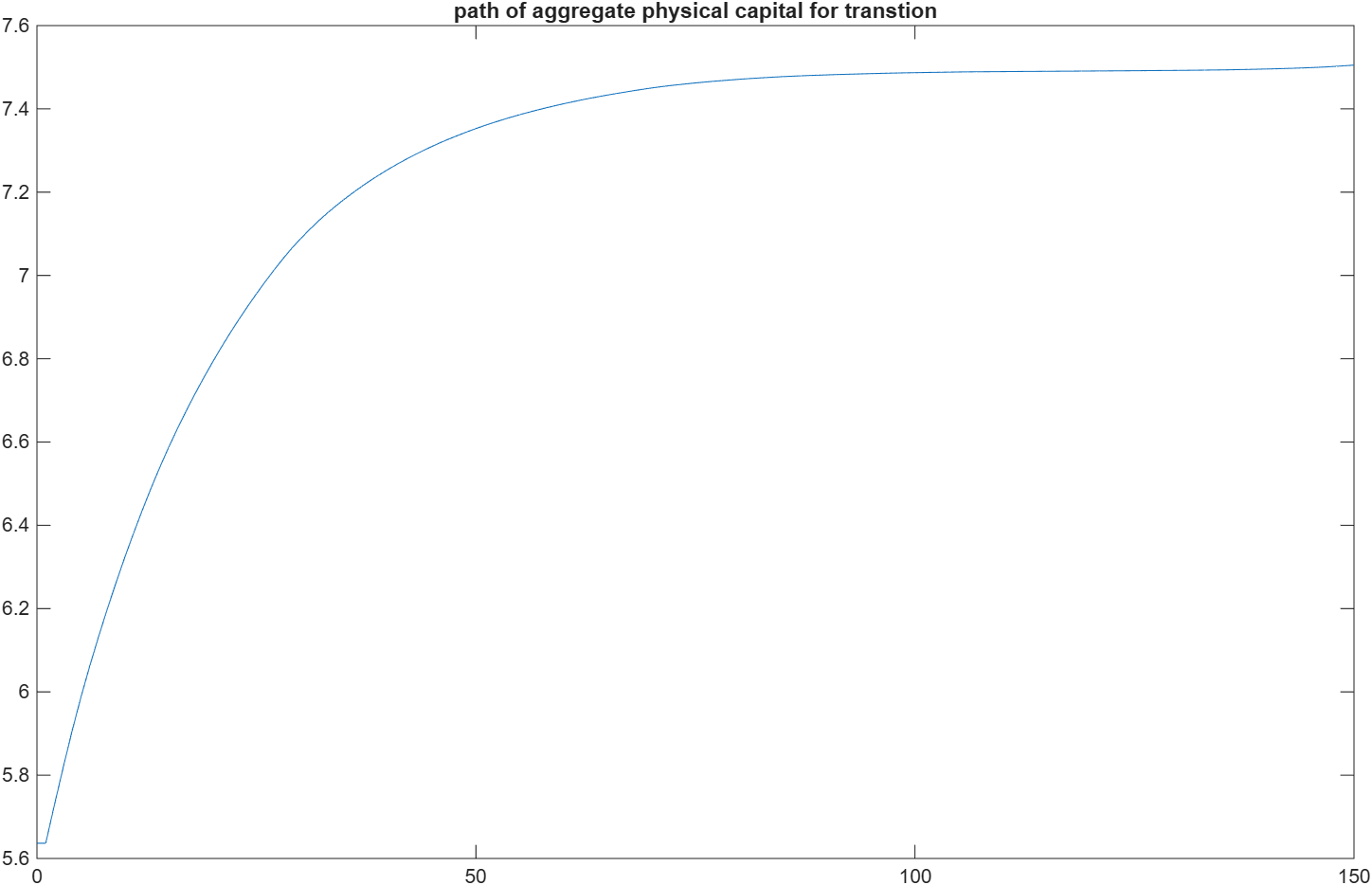
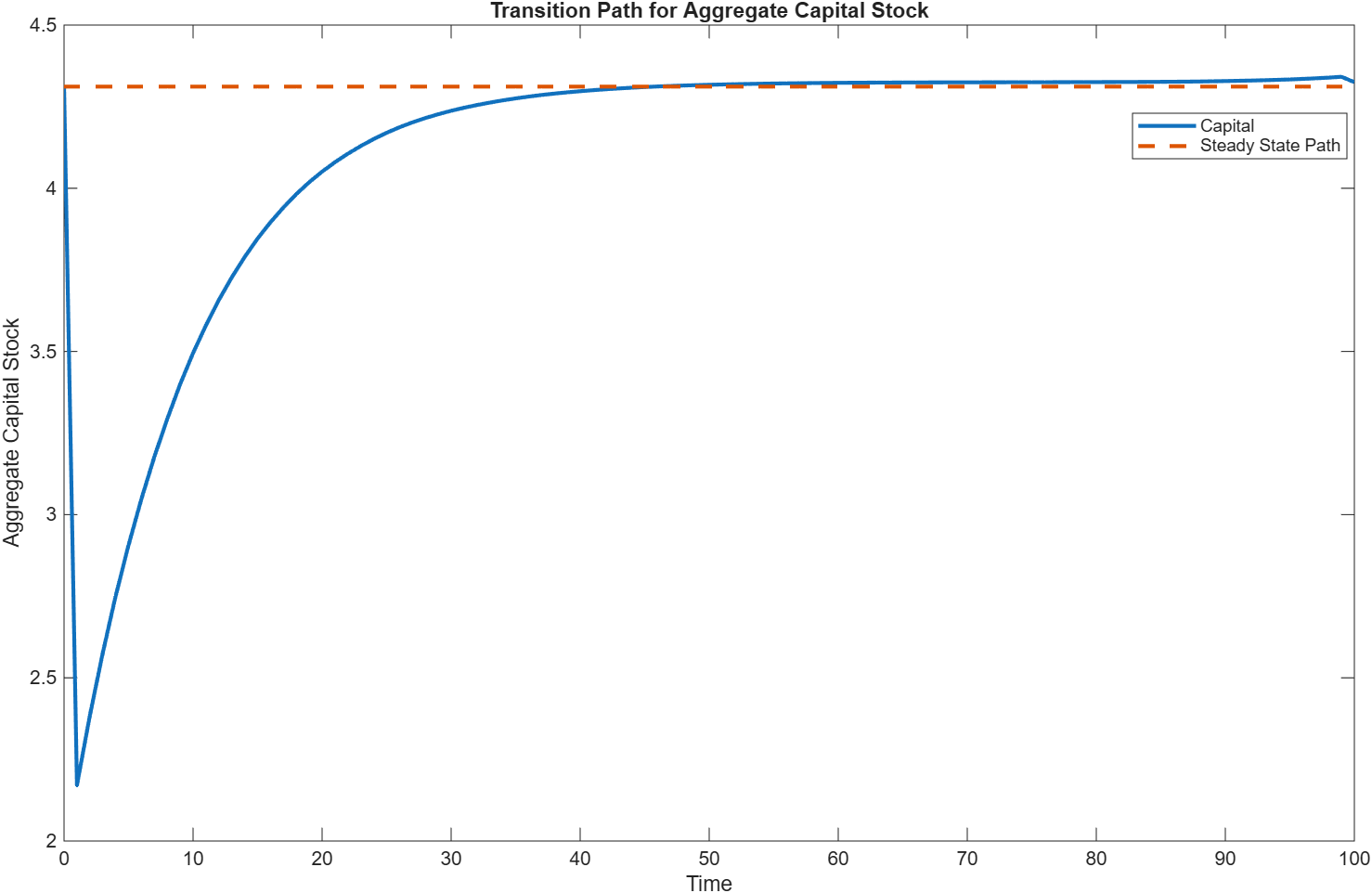
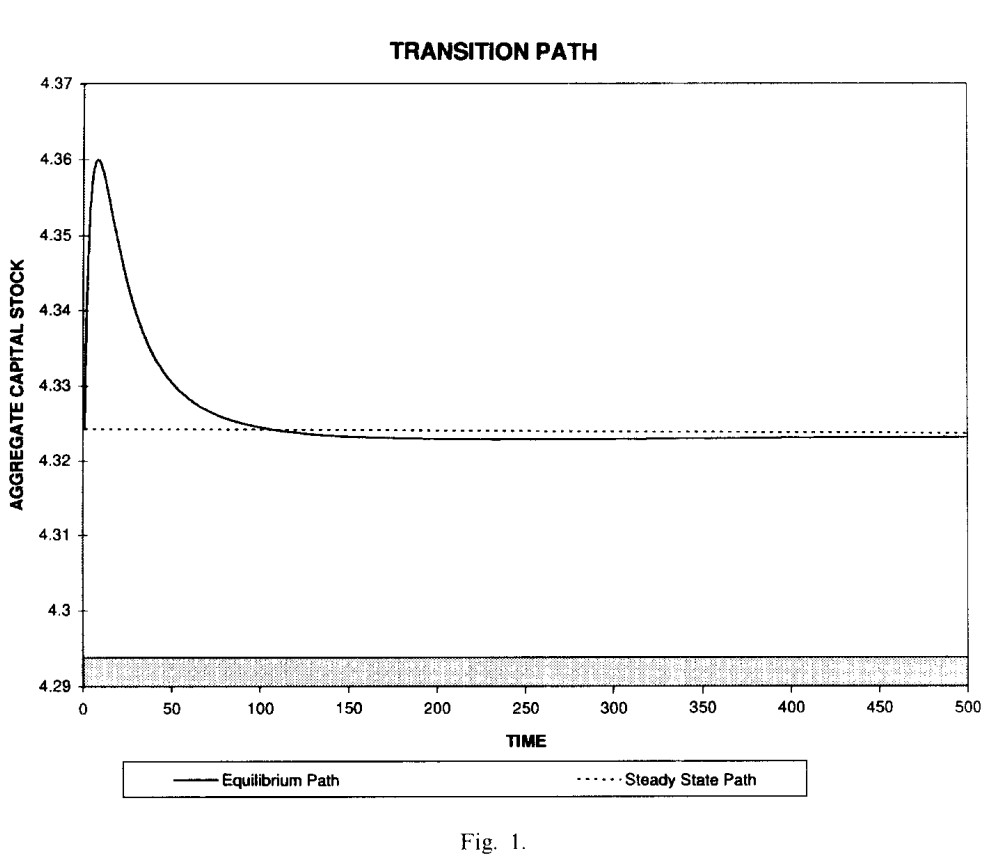
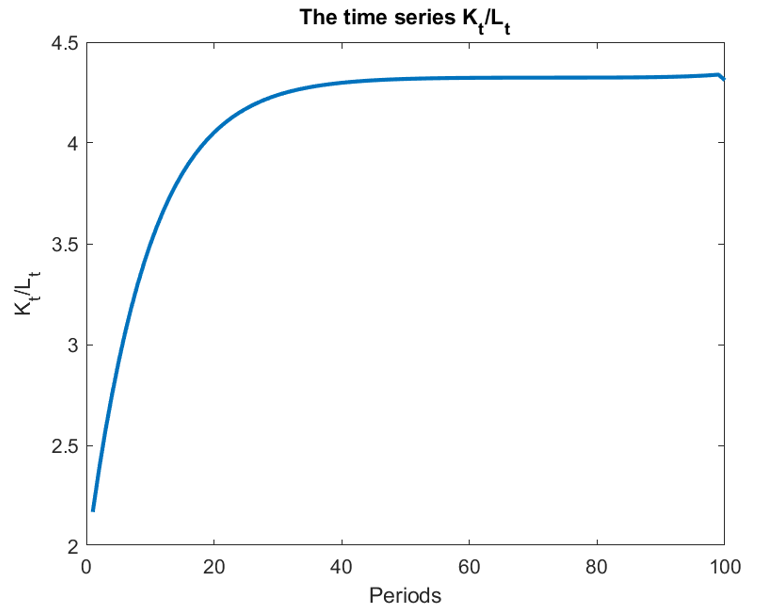
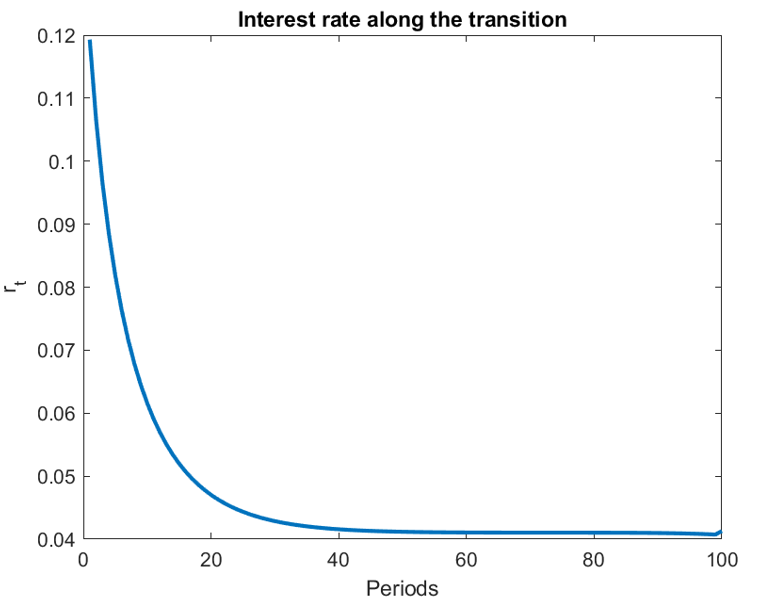
I wrote a replication of Huggett 1997:
Huggett, Mark, 1997, “The one-sector growth model with idiosyncratic shocks: Steady states and dynamics,” “Journal of Monetary Economics”, Elsevier, volume 39, issue 3, pages 385-403, August.
My replication code is available in this repo.
Problem 1: Bug
Unfortunately, the transition does not run due to a bug in ValueFnIter_InfHorz_TPath_SingleStep_nod_raw. The error message is the following:
Unrecognized function or variable 'n_d'.
Error in ValueFnIter_InfHorz_TPath_SingleStep_nod_raw (line 58)
Policy=UnKronPolicyIndexes_Case1(Policy,n_d,n_a,n_z,vfoptions);
^^^
Error in ValueFnIter_InfHorz_TPath_SingleStep (line 24)
[VKron,PolicyKron]=ValueFnIter_InfHorz_TPath_SingleStep_nod_raw(VKron,n_a, n_z, a_grid, z_gridvals, pi_z, ReturnFn, Parameters, DiscountFactorParamNames, ReturnFnParamNames, vfoptions);
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
Error in TransitionPath_InfHorz_shooting_nod (line 144)
[V, Policy]=ValueFnIter_InfHorz_TPath_SingleStep(Vnext,0,n_a,n_z,[], a_grid, z_gridvals, pi_z, ReturnFn, Parameters, DiscountFactorParamNames, ReturnFnParamNames, vfoptions);
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
Error in TransitionPath_Case1 (line 349)
[PricePath,GEcondnPath]=TransitionPath_InfHorz_shooting_nod(PricePathOld, PricePathNames, PricePathSizeVec, ParamPath, ParamPathNames, ParamPathSizeVec, T, V_final, AgentDist_initial, n_a, n_z, pi_z, a_grid,z_gridvals, ReturnFn, FnsToEvaluate, GeneralEqmEqns, Parameters, DiscountFactorParamNames, ReturnFnParamNames, GEeqnNames, vfoptions, simoptions,transpathoptions);
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
Error in main_huggett_1997 (line 185)
PricePath=TransitionPath_Case1(PricePath0, ParamPath, T, V_final, StationaryDist_init, n_d, n_a, n_z, pi_z, d_grid,a_grid,z_grid, ReturnFn, FnsToEvaluate, TransPathGeneralEqmEqns, Params, DiscountFactorParamNames, transpathoptions,vfoptions, simoptions);
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
The bug is quite easy to spot: In line 58 of ValueFnIter_InfHorz_TPath_SingleStep_nod_raw there is the line
%% Policy in transition paths
Policy=UnKronPolicyIndexes_Case1(Policy,n_d,n_a,n_z,vfoptions);
but n_d is not available in the function.
Problem 2: Transition not coded with interpolation?
The above error message happens if vfoptions.gridinterplayer = 0. If I set instead vfoptions.gridinterplayer = 1, there is a toolkit message that says that this case is not implemented yet. Would it be possible to flag this as a priority? I guess that computing a transition in infinite horizon models, with interpolation, is a relatively common case; it could be used for example as a robustness check in Bruggeman 2021. Many thanks! ![]()